NO CAMINHO EXISTENTE ENTRE A CENA E A TELA, VÁRIOS FATORES PODEM PREJUDICAR A QUALIDADE DA IMAGEM. O ARTIGO ABORDA DOIS DELES, O ALIASING E O SHARPENING. A RESOLUÇÃO DA IMAGEM PODE SER A CHAVE PARA RESOLVER OU MINIMIZA O PROBLEMA.
Os aliasing visíveis na fig. 4 incluem os tipos de A até E, mencionados previamente, além dos outros abaixo definidos:
• Tipo G: variação na posição da linha;
• Tipo H: variação do nível médio ou brilho de grupos de linhas;
• Tipo I: assimetria da resposta de amplitude da linha;
• Tipo J: diferenças no perfil de luminância entre linhas adjacentes.
Um outro tipo de aliasing não visível claramente aqui é:
• Tipo K: coloração devido a diferenças em resposta dos canais de croma como, por exemplo, sub-amostragem de croma.
Novamente, este artigo trata apenas do tipo A. Entretanto, a inspeção visual e a análise sugerem esses outros tipos. É desejável que trabalhos adicionais possam estender esta taxinomia de efeitos de aliasing e adaptar as definições de modo que elas sejam mutualmente ortogonais. Esse trabalho pode levar em consideração a natureza não linear dos sistemas de imagem e que estas não-linearidades freqüentemente ocorrem em múltiplos espaços ao longo da trajetória do sistema. Extensões deste estudo podem também considerar aliasing aleatório, texturas regulares e os efeitos do movimento da imagem.
A figura 4 mostra efeitos interessantes não vistos na fig. 3. A imagem 4(a) mostra cada linha e tem variação de sua largura, junto com junção entre elas (tipo A e B). Isso renderiza as linhas na mais alta freqüência e tem uma banda dominante à direita. A 4(b) é de qualidade consideravelmente mais baixa, não mostra todas as linhas, tem junções acima da faixa de freqüência (tipo H) e perda de linhas. Também é superaguçada (oversharpened). A 4(c) mostra quase toda linha em baixo contraste, com pouca junção. Contudo, 4(d) mostra toda linha e algumas junções nas freqüências mais baixas (tipo A, B e H) e uma linha dominante à direita. Em 4(e), cada linha é visível com representativo aliasing nas freqüências mais baixas e variação do nível médio ou brilho de grupos de linhas (tipo H). Em 4(f), há linhas perdidas e uma variação de contraste de linhas com algumas áreas, tendo uma taxa de alias (tipo A) acima de 100 %. Esta imagem também é superaguçada e sugere o (tipo F) de aliasing. Uma excelente representação da carta de teste sem junções visíveis na cena é mostrada na 4 (g). Porém, há uma sugestão do (tipo H). A imagem 4(h) mostra junção na extensão onde as listras aparecem em diferentes posições (tipo A e B), cujas larguras de linhas são diferentes das originais (tipo C). Algumas das linhas originais não são visíveis e causam um aumento na taxa de aliasing, que é significativamente maior do que 100%. A imagem 4(i) tem pouca junção e toda linha visível em contraste mais baixo. Entretanto, parte da imagem não foi capturada.
|
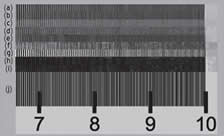 Fig. 4 – Amostras de 1920 a 4096 pixels/linha de vários pontos de uma câmara digital, filme escaneado, projeção de filme, projeção eletrônica e um dispositivo vetorial para rastrear a região turquesa da Figura 2. Para fornecer os detalhes necessários às imagens foram superpostas ou parcialmente cobertas. Fig. 4 – Amostras de 1920 a 4096 pixels/linha de vários pontos de uma câmara digital, filme escaneado, projeção de filme, projeção eletrônica e um dispositivo vetorial para rastrear a região turquesa da Figura 2. Para fornecer os detalhes necessários às imagens foram superpostas ou parcialmente cobertas.
|
Finalmente, 4 (j) mostra cada linha da carta de teste ISO, havendo, entre as linhas, significativa variação no contraste e na largura delas (tipos A, B, C, D, G, I e J).
Observe que em ambas, (fig.3 e 4), as freqüências espaciais das irregularidades do tipo A são menores do que as das imagens que as estimularam. Conforme a freqüência cai, a visibilidade freqüentemente melhora, porque a freqüência espacial da irregularidade que é vista pelo observador (dependendo do número de alturas de imagem na tela) pode ocorrer numa freqüência onde os olhos são mais sensíveis. O sistema visual humano é sensível ao movimento. Portanto, ele aumenta substancialmente a visibilidade da irregularidade. Assim, embora algumas das cenas paradas nas fig.3 e 4 não mostrem defeitos, eles podem aparecer quando as cenas são vistas em movimento. De fato, nas fig.3 e 4, eles podem mover-se, tremer ou cintilar conforme a cena se move através da estrutura de pixels, enquanto outros permanecem estacionários. Em geral, quando vistos em movimento, essas irregularidades são mais visíveis do que nos ilustrados das figuras 3 e 4. Devido às interdependências de movimento e aos vários tipos de aliasing, é importante observar as imagens móveis (e processadas digitalmente) em telas largas e de diferentes distâncias. Também é importante fazer essa avaliação usando métodos de projeção empregados quando a qualidade/característica do filme é liberada.
|
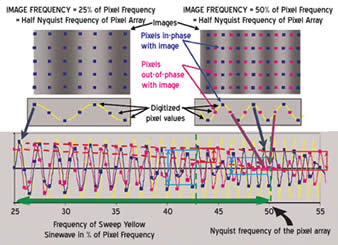
Fig. 5 – Alias formado por ter conteúdo de imagem abaixo da freqüência de Nyquist para o arranjo de pixel.
|
Uma ilustração da formação do aliasing
A figura 5 ilustra uma causa do aliasing (tipo A), visto nas fig. 3 e 4. Para simplificar a ilustração, foi mostrada uma forma muito restrita dele. É conhecido aliasing (tipo A), sub-Nyquist, orientado por pixels e unidimensional. Em outras palavras, um subconjunto de aliasing (tipo A). Estes termos são definidos conforme segue:
• Unidimensional: esta analise é desenvolvida apenas em uma dimensão espacial. O aliasing de duas dimensões, que ocorre mais freqüentemente em imagens, é mais complexo e, portanto, não é considerado nesse exemplo.
• Orientado por pixels: as características de imagem orientadas estão entre zero e poucos graus dos eixos da estrutura dos pixels.
• Sub-Nyquist: este artigo se refere as freqüências de imagem abaixo da freqüência de Nyquist na estrutura do pixel, sendo chamada de sub-Nyquist. A freqüência de Nyquist da estrutura de pixel é definida como a metade da sua freqüência nas direções vertical e horizontal. Logo, elas se aplicam quando há variações de freqüências espaciais nessas direções. As formas adicionais de aliasing (tipo F) surgem quando as freqüências de imagem estão acima da freqüência de Nyquist na estrutura do pixel.
• Aliasing (tipo A): flutuações na luminância ao longo das linhas claras da imagem ou entre elas.
Outras irregularidades e variações, nas fig.3 e 4, não estão incluídas nessa ilustração, porque somente o aliasing (tipo A) está sendo considerado em detalhes, com medições baseadas no uso do método esboçado no padrão ISO 12233. Apesar destas restrições, as ilustrações na fig. 5 explicam a importância dos aliasing inseridos pelos processos de digitalização. A terminologia usada pelo padrão ISO 12233 para características da freqüência de imagem é largura de linha por altura de imagem. É como se um lápis preto e um lápis branco alternativamente desenhassem imagens de linhas paralelas adjacentes, em um fundo cinza. Se a largura das marcas do lápis fosse igual a um pixel (e o perfil da luminância de cada linha do lápis corresponde a metade de uma onda senoidal), a imagem da onda senoidal, vista na parte superior direita da fig. 5, pode ser extraída. Isso corresponde a imagem da onda senoidal com uma freqüência igual a freqüência de Nyquist da estrutura do pixel; especificamente imagem de linhas escuras e claras, cada uma da largura do espaço entre os pixels. Assim, a freqüência dessa imagem é igual a metade (50%) da freqüência do pixel e é, conseqüentemente, igual a freqüência de Nyquist.
A amostragem do lado superior direito da imagem, usando a estrutura do pixel azul posicionada em fase com as linhas de imagem, produz valores de pixel azul ligados pela onda senoidal amarela abaixo da imagem. Entretanto, a amostragem usando a estrutura de pixel magenta, posicionada fora de fase com a imagem das linhas, produz pixels magenta de valores constantes e ignora completamente o conteúdo da imagem. Portanto, os valores de pixel magenta fora da fase indicam incorretamente que a onda senoidal da imagem não existe. Isso é importante porque quando uma imagem é captada, os pixels podem cair na posição magenta, na posição azul ou qualquer posição entre elas, causando diferentes resultados.
|
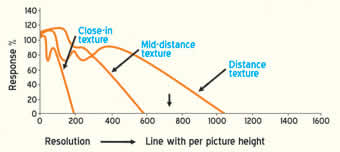
Fig. 6 – A resposta de freqüência de uma cena tipo textura para várias distâncias de captura.
|
A posição superior esquerda da fig. 5 mostra a imagem de onda senoidal com freqüência de 25% da freqüência do pixel ou metade da Nyquist para a estrutura do pixel. Isso corresponde à metade de um intervalo de pixel por largura de linha clara ou escura de imagem. Consequentemente, a parte superior esquerda da imagem é metade da freqüência da parte superior direita. Nessa freqüência, digitalizar usando estrutura de pixel azul em fase versus uma estrutura fora de fase, não apresentada novamente, resulta em significativas diferenças de amplitudes de pixels. Porém, a diferença entre amplitudes na amostragem é menor do que a diferença para a imagem na posição superior direita.
A onda senoidal amarela esticada, na parte inferior da fig. 5, representa o perfil de luminância de uma cena hipotética para demonstrar alias a partir de freqüências abaixo de Nyquist na estrutura do pixel. A onda senoidal varre, através da extensão da linha verde, com setas desde 25% até 50% da freqüência do pixel (50% a 100% da freqüência de Nyquist). As freqüências da senoide amarela nos extremos da linha verde são as mesmas das ondas senoidais das partes superior esquerda e superior direita das imagens.
Como todas as freqüências na onda senoidal amarela (no espaço marcado pela linha verde) estão abaixo da freqüência Nyquist para a estrutura do pixel, elas são, por definição, sub-Nyquist. Assim a cena representada pelas linhas amarelas satisfazem os requisitos do teorema de amostragem 7,8 e a teoria de Nyquist para amostragem, que estabelece pelo menos duas amostras por ciclo de sinal. Além do mais, como nenhuma freqüência dentro da faixa verde excede a exigência de dois pixels por ciclo, a porção verde do sinal não necessita ser limitada em banda 9.
Ao digitalizar o perfil da cena representada pela onda senoidal amarela, usando os pixels azuis da estrutura em fase, se produz valores de pixels mostrados com quadrados azuis. De modo similar, uma estrutura de pixels fora de fase produz a onda com marcadores de cor magenta. Dentro do intervalo da linha verde, ambos os conjuntos de valores de pixels satisfazem os requerimentos do teorema de amostragem.
Na parte final do 100% de Nyquist (correspondente a 50% da freqüência do pixel), as setas azul e amarela apontam para pixels equivalentes no diagrama digitalizado e no desenho da varredura de freqüência. Na freqüência Nyquist da estrutura de pixels, os marcadores magenta e azul definem a resposta mínima e máxima da onda senoidal amarela. A taxa de aliasing é a “resposta máxima menos a mínima” das barras brancas para o “nível médio de modulação”10. O espaçamento entre as setas vermelhas mostra a diferença entre as amplitudes magenta e azul, assim correspondendo a “resposta máxima menos a mínima”. O espaço da seta turquesa mostra o “nível médio de modulação”. A taxa de aliasing é a relação entre os espaços vermelho e turquesa. Dessa forma, a taxa de aliasing é 100% nas freqüências de sinal iguais as de Nyquist da estrutura do pixel, porque os espaços vermelho e turquesa são os mesmos. Em outras freqüências, as formas de ondas magenta e azul são respostas típicas, mas não são nem máxima e nem mínima. Para encontrar as respostas mínimas e máximas nessas freqüências, é necessário recorrer a análise matemática.
O espaçamento entre as duas linhas vermelhas pontilhadas (e as setas vermelhas, medido nas linhas verdes tracejadas) aproxima-se da “resposta máxima menos a mínima”, sobre a freqüência de cena da linha amarela, na faixa de 25% a 50% da freqüência de pixel (50% a 100% da freqüência Nyquist da estrutura de pixel).
Lembre-se que no intervalo da linha verde, todas as freqüências da cena estão abaixo ou na freqüência Nyquist da estrutura do pixel. O fato de ocorrerem variações significativas de aliasing dentro deste intervalo desafia a crença comum que ele somente pode ocorrer quando as freqüências da cena estão acima da freqüência Nyquist da estrutura do pixel. De fato, pode ser concluído que há diferentes tipos de aliasing e pelo menos um deles, o (tipo A), pode inserir significativas irregularidades em imagens tendo componentes de freqüência abaixo da freqüência Nyquist da estrutura de pixel.
Resolução limite, Forma da Resposta de Freqüência e Sharpness
A segunda interdependência tratada neste artigo ocorre entre a resolução limite, a forma da resposta de freqüência e o sharpness. As três curvas verdes na fig. 6 mostram a resposta de freqüência da cena de uma mesma textura captada em três distâncias diferentes. Note que conforme a textura é afastada da câmera, sua resposta de freqüência se estende pelo eixo de resolução. Uma mudança na resposta de freqüência da cena também ocorre conforme varia o zoom.
Apesar dos espectadores se manterem a uma distância constante em relação à tela, quando sentados em um teatro, eles desejam uma experiência realística em toda extensão da profundidade da cena original. Isso requer que a resposta de freqüência, em combinação com a resposta de visão dos espectadores, comporte-se de uma maneira que seja similar àquela que os espectadores vêem o mundo real. Conseqüentemente, para uma primeira aproximação à resposta de freqüência da textura, desde a cena até a tela, apresentada aos espectadores, idealmente não deve ser afetada por perda de qualidade ou contaminação de irregularidades. Portanto, especialmente para movimentos de câmera realísticos, a resposta de freqüência da textura do filme, desde a cena até a tela, deveria ser suave e plana, o mais próximo possível de 100%.
Para melhor atender estas exigências conflitantes, a resposta de freqüência, desde a cena até a tela, desliza e cai suavemente, como mostrada na curva amarela contínua da fig. 7, respondendo além do limite de resolução. Contudo, alguns sistemas têm um limite restrito de resolução, devido a fatores como limitações na quantidade de pixels, produzindo a resposta mostrada pela linha sólida laranja.
|
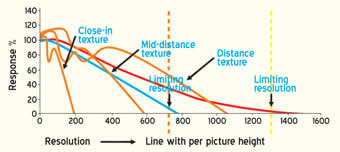
Fig. 7 – Estendendo o limite de resolução da resposta de freqüência cena/tela, mostrada em amarelo,
se fornece uma curva com inclinação mais suave.
|
O sharpness é uma avaliação subjetiva influenciada pela limitação da resolução e forma da resposta de freqüência. O reforço (Peaking), usando filtros digitais para aumentar a amplitude da resposta de freqüência do sistema, varia a forma total da resposta e pode, por sua vez, ampliar o sharpness percebido. A relação entre a resposta de freqüência e sharpness tem sido estudada extensivamente por Barten 11, Granger e outros.12
Um exemplo do aumento do sharpness é mostrado na fig. 8, onde a resposta da linha contínua alaranjada da fig. 7 foi reforçada, ficando com a forma da linha tracejada vermelha para aumentar o sharpness. Porém, pelas razões mencionadas acima, quando esse método é usado para aumentar o sharpness, a significativa inclinação sofrida pela curva de resposta tracejada em vermelho pode provocar perda do realismo nas imagens em movimento.
|
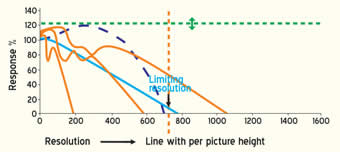
Fig. 8 – Para melhorar o sharpness, a resposta de freqüência cena/tela pode ser reforçada dentro de limites estreitos, mas nos sistemas com poucos pixels esse reforço tem restrições na região do limite de resolução.
|
A figura 9 compara a resposta reforçada da linha amarela contínua (curva amarela tracejada) com a extensão do limite de resolução (linha vermelha tracejada). Note que diferenças nas inclinações permitem a curva tracejada em amarelo dar uma resposta de movimento superior, quando comparada com a curva tracejada em vermelho. A fig. 10 compara a resposta dos quatro sistemas, já considerando a distância original na resposta da textura verde, primeiramente mostrada na fig. 6. Os sistemas são:
• Resolução limite reduzida – linha laranja contínua. Figuras 7 à 9.
• Resolução limite reduzida com reforço – linha tracejada em vermelho. Figuras 8 e 9.
• Resolução limite estendida – linha amarela sólida nas Figuras 7 e 9.
• Resolução limite estendida com reforço – linha tracejada em amarelo na Figura 9.
|
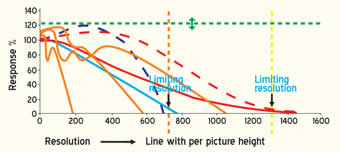
Fig. 9 – Para melhorar o sharpness, a curva amarela da resposta de freqüência pode ser reforçada como mostrado na linha amarela tracejada, enquanto mantém a resposta máxima próxima de 100%. O reforço pode atingir também o limite de resolução se não houver limitações da quantidade de pixels ou aliasing.
|
A resposta de cada sistema para a textura verde distante é mostrada na fig. 10. Cada uma das quatro colorações de resposta para as texturas é mostrada nas mesmas cores como os sistemas listados acima.
Conseqüentemente, a linha laranja mostra o resultado na tela, após a textura passar através da curva de resposta laranja nas Figuras de 7 à 9. Observe o desvio a partir da resposta da textura original. Além do mais, esse desvio depende da posição da textura em relação à câmera. A curva de resposta pontilhada em vermelho, na fig. 10, mostra uma redução no desvio. Entretanto, o aumento na inclinação muda a forma da resposta de textura. Essas mudanças são mais sérias em movimento. A linha tracejada em amarelo, resultante de um reforço na resposta da sua equivalente também em amarelo, fornece o melhor casamento e é a que está mais próxima para preservar a forma da curva original.
Para resumir, quando a escala de texturas muda devido à posição, zoom ou de ângulos, a resposta da textura na tela de cinema flutua, porque como os componentes da freqüência das texturas varrem toda a curva de resposta com o limite de resolução reduzido, a amplitude das diferentes bandas de freqüência dos componentes flutua. Dessa forma, estendendo o limite como mostrado nas curvas contínuas e tracejadas em amarelo e, ainda, aumentando a amplitude da resposta como mostrado nas curvas tracejadas em amarelo, se aumenta o sharpness e se produz uma inclinação mais gradual “para a visão”, na resposta da cena até a tela. Isso reduz os desvios de amplitude de freqüência, conforme eles varrem toda a curva de resposta, além de captar mais informação da cena. Também é evidente que ao estender a resolução limite, a visão sobre a resposta do sistema da cena até a tela se torna mais próxima de adequar-se com o que os olhos vêem no mundo real. Isso fornece uma imagem estacionária mais realística e, o que é mais importante, uma renderização realística das texturas em movimento.
|
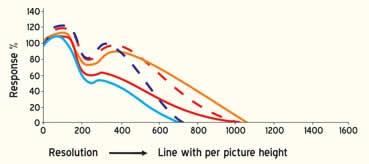
Fig. 10 – O efeito da distância de captura na resposta dos 4 sistemas analisados. Verde é a resposta da carta de teste. As outras cores correspondem às respostas das suas equivalentes nas figuras anteriores.
|
Conclusão
Quando se percorre a trajetória da cena até a tela surgem numerosas oportunidades para perder a qualidade da imagem e introduzir irregularidades. Freqüentemente, essas oportunidades de degradar a cena são interativas. Este artigo considerou duas dessas interdependências em detalhes.
A primeira produz aliasing a partir do conteúdo da imagem com freqüências abaixo de Nyquist na estrutura de pixels, definida como a metade da freqüência do pixel. Apesar da clássica e histórica teoria de Nyquist poder ser satisfeita com filtragem para reduzir a banda, que também pode introduzir outros problemas, antes da amostragem seguida pela reconstrução ideal após a renderização, o aliasing pode e irá ocorrer na prática. Na captação, o aliasing ocorre devido a numerosas razões, incluindo resolução limitada de pixels e dificuldade em implementar a redução ideal de banda, pois as imagens do mundo real não são geralmente estacionárias. Nas telas de observação da imagem, o aliasing é freqüentemente devido a limitações na resolução e dificuldades práticas em alcançar a reconstrução nos sistemas de cinema digital, com a precisão de Nyquist. Essas fontes de aliasing serão discutidas em um artigo do jornal da SMPTE. Uma interpretação da teoria Nyquist, que evita muitos desses problemas de aliasing, tem surgido ao longo dos anos, provavelmente, sem o entendimento que tal interpretação não esteja de acordo com os teoremas clássicos ou com a prática real.
Para melhor entender o aliasing, este artigo incluiu a classificação dos seus vários tipos a saber:
• Tipo A: flutuações em luminância ao longo das linhas claras (ou entre elas) da imagem;
• Tipo B: flutuações em luminância ao longo das linhas pretas (ou entre elas) da imagem;
• Tipo C: variações na largura das linhas da imagem;
• Tipo D: variações em posição da linha de contorno da imagem;
• Tipo E: linhas adicionais acrescentadas em várias direções;
• Tipo F: ruído adicionado à imagem devido a componentes da cena com freqüência mais alta do que a freqüência de Nyquist;
• Tipo G: variação na posição da linha;
• Tipo H: variação do nível médio ou brilho de grupos de linhas;
• Tipo I: assimetria da resposta de amplitude da linha;
• Tipo J: diferenças no perfil de luminância entre linhas adjacentes.
A segunda interdependência mostrou que ao estender a resolução limite, a visão sobre a resposta do sistema da cena até a tela se torna mais próxima de combinar com que os olhos vêem no mundo real. Isso produz uma imagem mais aguçada e realística. Contudo, estender os limites da resolução requer um aumento de pixels, que produzem outros benefícios. Por exemplo, o trabalho de Swinson¹³ mostra que aumentar a quantidade de pixels pode melhorar significativamente o desempenho da compressão. Consequentemente, essa opção é a chave para minimizar os efeitos danificadores de ambas as interdependências tratadas neste artigo.
A primeira parte deste artigo foi publicada
na edição 79 da Revista da SET.
Agradecimentos
Os autores gostariam de agradecer a Jean-Fabien Dupont, Jim Fleming, Jon Gehret, Steve Hryvniak, Phil LaRock, Steve MacLean, Janice Morton, Mark Rzadca, Steve Shanker e Ron Uhlig pelas significativas contribuições feitas para esse trabalho.
OS AUTORES
Roger R. A. Morton é pesquisador na Eastman Kodak Co. Ele possui Ph.D na área de pesquisa em imagem digital. Durante sua carreira, Morton desenvolveu novos conceitos digitais introduzindo-os no mercado. Ele é um pioneiro em algoritmos para análise de imagens, análises de imagens ópticas e de raios X, além de impressão e visualização de imagens em 3D e equalização automática de áudio. Em reconhecimento a esse pioneirismo e trabalho inovador, Morton tem 60 patentes americanas e várias internacionais.
Christopher L. Dumont é um técnico sênior associado com a Kodak Co. Ele tem um B.S. em ciência da imagem e um M.S. em química analítica do RIT. Nos últimos 12 anos, Dumont trabalha em estúdios de cinema, desenvolvendo novos negativos, intermediários, híbridos e produtos digitais para uso na indústria de cinema. Seus mais recentes projetos foram os desenvolvimentos para o Kodak Preview System e tecnologias para dramaturgia a serem usadas nas salas de exibição. Dumont é membro da SMPTE, já escreveu e apresentou vários trabalhos nas conferências organizadas pela Sociedade. Ele tem seis patentes no campo da ciência da imagem para a Kodak.
Michelle A Maurer é uma cientista pesquisadora dedicada à Eastman Kodak Co. Ela tem um B.S. em química, com um curso de especialização secundária em ciência da computação da Universidade de Buffalo. Durante os dez anos de Kodak, ela esteve envolvida no projeto de novos filmes, usando modelagem computacional e simulação. Maurer contribuiu para a criação dos filmes SFX200T da Kodak, Vision e Vision Premier esses dois últimos para impreess. Entre as suas principais investigações, ela avaliou a reprodução de cores, o impacto e a inter-relação entre contraste e sharpness do filme para cinema. Ela está intensamente envolvida em relatórios de avaliação dos clientes que compram produtos kodak.
Referências/Notas
1 – Roger R. A. Morton, Micelle A. Maurer, and Christopher L. Dumont, “Assessing the Quality of Motion Picture Systems from Scene-to-Digital Data,” SMPTE J., 111:85-96, Feb/Mar. 2002.
2 – ANSI/SMPTE 268M-1994 –”File Format for Digital Moving-Picture Exchange (DPX),” SMPTE, 595 W. Hartsdale Ave., White Plains, NY 10607, Aproved Feb. 18, 1994.
3 – “Reference Output Medium Metric RGB Color Space (ROOM RGB) White Paper,” http://www.kodak.com/go/room_rgb.
4 – “ISO 1233: 2000 Photography-Electronic Still Picture Cameras – Resolution Measurements,” published Sept. 1, 2000.
5 – The actual wording in section 6.4 of the ISO 12233 standard referenced above is: “The ratio of this ‘maximum minus minimum response’ for the white bars within a burst to the ‘average modulation level’ …”.
6 – To achieve accurate measurements, preserve the white end of the scale so it is not “crushed” by low gamma or white saturation.
7 – Alan V. Oppenheim and Alan S. Willsky, Signals and Systems, Prentice Hall Signal Processing Series, 1983, pp 513-531. This book includes a classic undergraduate treatment of aliasing.
8 – Gerald. C. Holst, Sampling, \aliasing and Data Fidelity: For Electronic Imaging Systems, Communications, and Data Acquisition, (SPIE Press Series, No.55), Jan. 1998, pp. 81-97, 158-227. This book addresses practical engineering issues related to sampling and reconstruction.
9 – One possible view is that the yellow sine wave is not stationary and that implicity the Nyquist theorem requires stationary signals. One difficulty with this view is that real world scenes are virtually always non-stationary. Thus, this is a simplified but real–world example. For a good discussion of stationary, see Julius Bendat and Allan Piersol, Measurement and Analysis of Random Data, John Wiley, 1966.
10 – “Average modulation level” is interpreted here as the average white level minus the average black level (for color channels read light for white and dark for black). The average white level is maximum white response (the maximum level across the white tilted bar) plus minimum white response (the minimum level across the white tilted bar) divided by two. Similary, average black level is maximum black response (that is the maximum level across the black tilted bar) plus minimum black response (the minimum level across the black tilted bar) divided by two. In all these measurements, the effect of random noise must be removed. In our measurements, we use frame-to-frame averaging across the test pattern and alias patterns. Note that average modulation level is also used in measuring the contrast transfer function (CTF) of a system. Thus, aliasing amplitude is the product of alias ratio, CTF, and image contrast.
11 – Peter G. J. Barten, Contyrst Sensitivity of the Human Eye and Its Effects on Image Quality, SPIE Optical Engineering Press, 1999.
12 – E. M. Granger and K. N. Cupery, “An Optical Merit Function (SQF) which Correlates with Subjective Image Judgments, “Photogr.Sci. Eng., 16::221-230, 1972.
13 – Peter R. Swinson “Evolution of Resolution in Film Scanners,” SMPTE J., 110:839-842, Dec. 2001.